Given a multi-object point cloud and a natural-language query describing an intended action, the goal is to predict a per-point affordance mask on the correct object. The same composition yields different targets depending on the query intent — and abstains when no object can fulfill it.
"When told to cut the cake," a robot must choose the knife over nearby scissors — despite both objects affording the same cutting function.
№ 01 · Abstract
In real-world scenes, multiple objects may share identical affordances, yet only one is appropriate under the given task context. We call such cases confusing pairs. Existing 3D affordance methods largely sidestep this challenge by evaluating isolated single objects, often with explicit category names provided in the query.
We formalize Intent-Driven Confusable Affordance Grounding, a 3D setting that requires predicting a per-point affordance mask on the correct object within a multi-object point cloud, conditioned on implicit natural-language intent. To study this problem, we construct CompassAD, the first benchmark centered on implicit intent in confusing multi-object compositions.
We further propose CompassNet, a framework with two dedicated modules. Instance-bounded Cross Injection (ICI) constrains language–geometry alignment within object boundaries to prevent cross-object semantic leakage. Bi-Level Contrastive Refinement (BCR) enforces discrimination at both geometric-group and point levels, sharpening distinctions between target and confusable surfaces. Experiments demonstrate state-of-the-art results on both seen and unseen queries, and deployment on a robotic manipulator confirms effective real-world transfer.
0
Confusing pairs
0
Affordance types
0
Multi-object compositions
0
Intent-driven queries
0
aIoU gain vs SOTA
0
SIM gain vs SOTA
№ 02 · The Task
Kitchens, workshops, and offices present multiple objects in close proximity. A knife and scissors both afford cutting. A skateboard and surfboard both afford riding. Shared affordance renders the target ambiguous from appearance alone — correct selection must be conditioned on task intent.
Given a multi-object point cloud and a natural-language query describing an intended action, our task is to predict a per-point affordance mask on the correct object, disambiguate confusable alternatives, and abstain when no object can fulfill the intent.
Formulation
ŷ = fθ(𝒫, 𝒬) ∈ [0,1]N
Point cloud 𝒫 + query 𝒬 → per-point affordance probability ŷ. Two queries 𝒬a ≠ 𝒬b over the same 𝒫 yield different masks.
For a scissors–knife pair on a table: "prepare vegetable slices" activates the knife blade; "cut paper" selects the scissors. For "play music," no activation occurs.
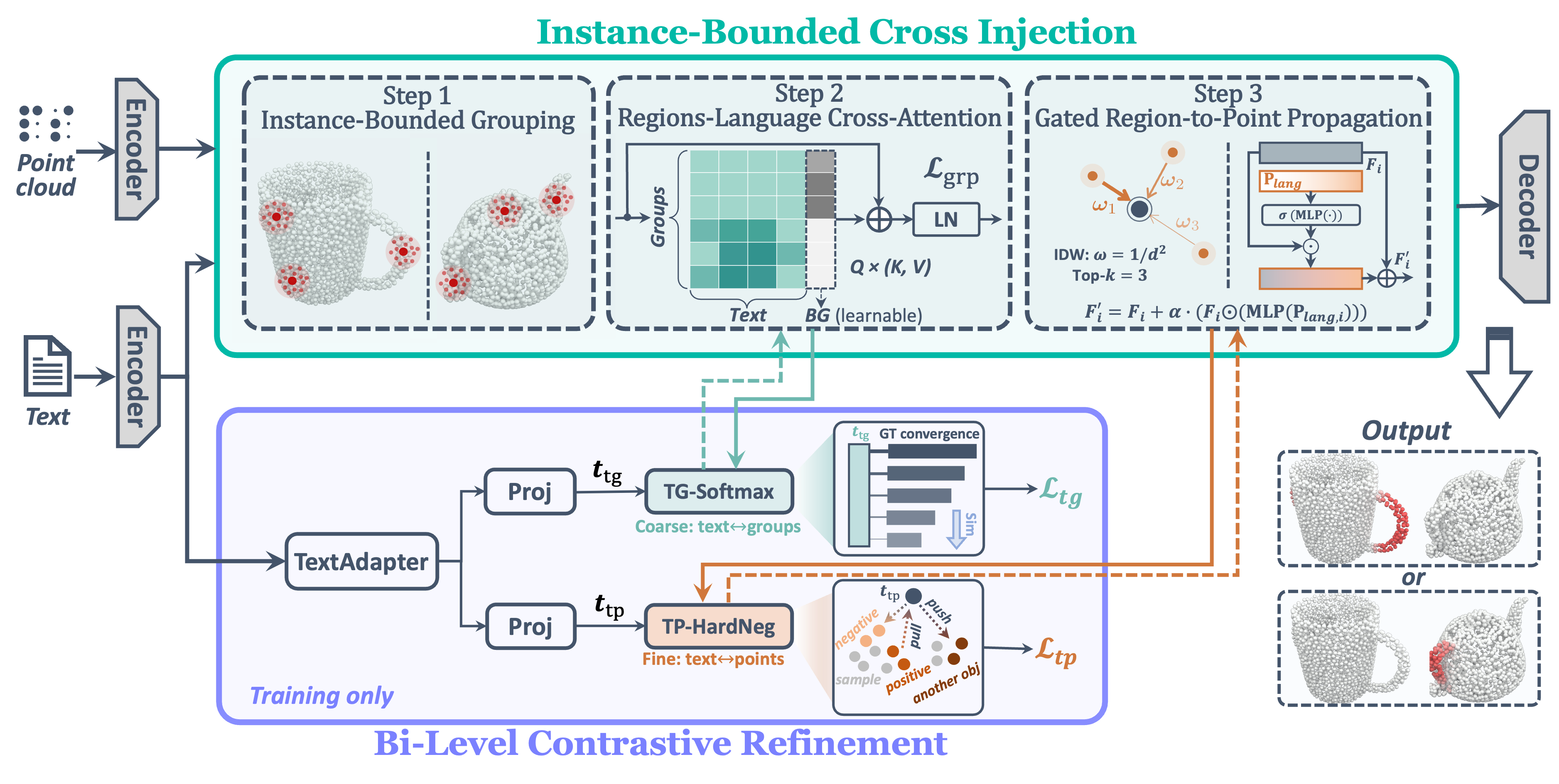
ICI confines region–language interaction within each instance via (i) instance-bounded grouping, (ii) region-language cross-attention with a learnable background token, and (iii) gated propagation back to points. BCR adds two training-only contrastive losses: TG-Softmax ranks the in-object region best matching the intent, and TP-HardNeg suppresses high-scoring negatives on confusable surfaces.
ICIInstance-Bounded Cross Injection
Cross-modal fusion is computed independently within each instance, so text cues cannot diffuse to competing surfaces.
Step 1
Instance-bounded grouping
Radius-graph connected components assign each point an instance label; FPS selects region centers within each instance only.
Step 2
Region–language cross-attention
Per-instance regions attend to text tokens augmented with a learnable background token — a sink for content no token can explain, enabling correct abstention.
Step 3
Gated region-to-point propagation
Each point inverse-distance-pools from its kp=3 nearest enhanced regions; a multiplicative gate routes language back to points without injecting activations from scratch.
BCRBi-Level Contrastive Refinement
Two complementary contrastive losses sharpen object selection and point-level discrimination. Both are training-only — zero inference overhead.
Region · TG-Softmax
Rank in-object regions by intent
Soft-label softmax ranks regions by affinity to the query; rewards regions whose points are most densely affordance-positive.
Point · TP-HardNeg
Suppress confident false positives
Smooth-max hard-negative mining enforces a margin between affordance points and the hardest negative on the wrong-object surface or same-object non-affordance region.
No-Cost at Inference
BCR backpropagates through ICI's representations during training but is dropped at inference. Zero added parameters or computation in the deployed model.
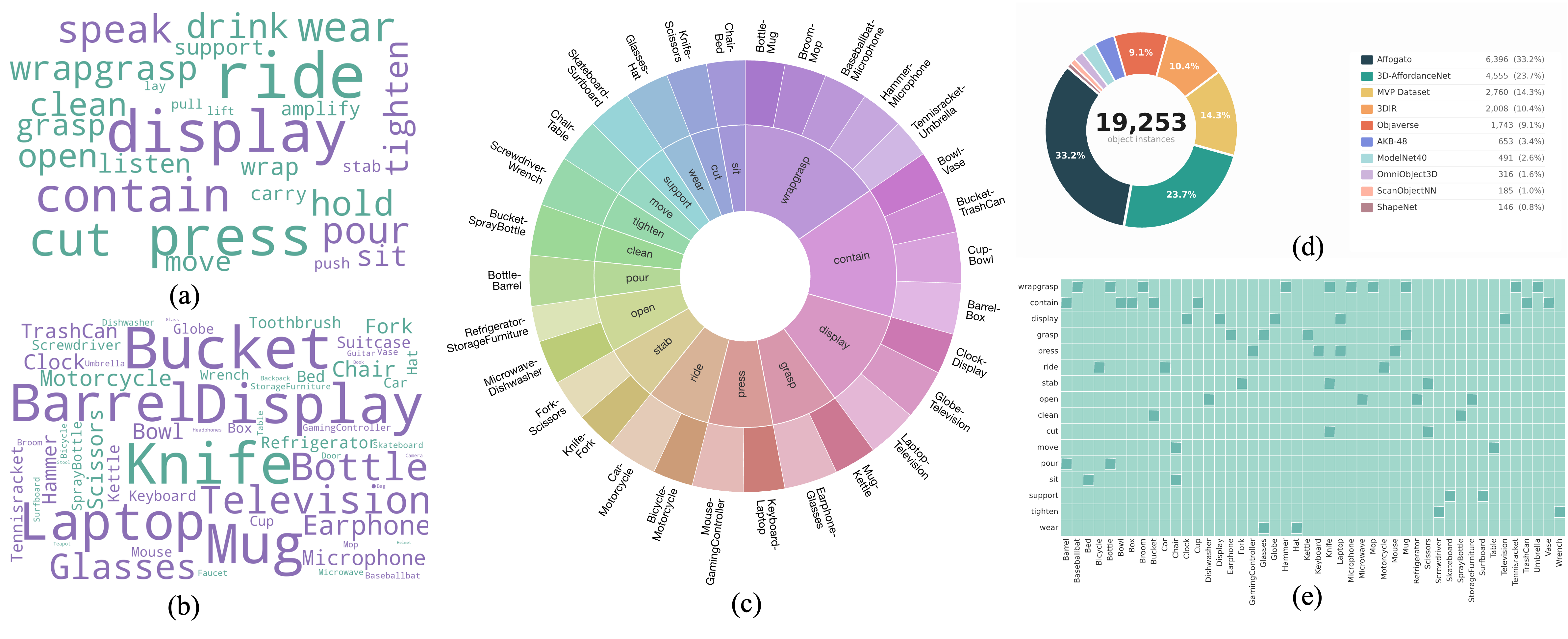
Overview of the CompassAD benchmark. (a) Affordance concept distribution. (b) Object category distribution. (c) Hierarchy of confusing pairs grouped by target affordance type. (d) Source breakdown of the collected 3D object instances. (e) Confusion matrix between affordance and object categories.
01 · Curation
Pairs by design
30 confusing pairs across 16 affordance types, sourced from synthetic CAD models and real-world scans. Each pair shares at least one target affordance and is functionally interchangeable.
02 · Compositions
Cluttered by construction
Each composition pairs one confusing pair with up to two distractor objects (2–4 instances total). Randomized placement and permuted slots prevent positional shortcuts.
03 · Queries
Intent-only language
GPT-generated intent-driven queries with no object names. Includes positive, negative (for abstention), and unseen splits to evaluate language generalization.
№ 05 · Results
State-of-the-art on seen and unseen splits.
+4.02 aIoU on Test-Seen · +3.54 aIoU on Test-Unseen vs. prior SOTA.
Method
Venue
aIoU ↑
AUC ↑
SIM ↑
MAE ↓
Test-Seen
3D-SPS
CVPR 2022
5.23
64.7
0.158
0.096
ReferTrans
NeurIPS 2021
5.81
66.3
0.171
0.093
ReLA
CVPR 2023
6.47
68.9
0.193
0.091
IAGNet
ICCV 2023
7.64
72.4
0.214
0.086
GREAT
CVPR 2025
9.23
75.7
0.237
0.082
PointRefer
CVPR 2024
10.52
79.3
0.260
0.079
GLANCE
ICCV 2025
14.18
87.5
0.296
0.077
CompassNet
Ours
18.20
89.2
0.368
0.061
Test-Unseen
3D-SPS
CVPR 2022
4.12
61.8
0.136
0.099
ReferTrans
NeurIPS 2021
4.58
63.5
0.148
0.096
ReLA
CVPR 2023
5.06
65.7
0.167
0.094
IAGNet
ICCV 2023
6.07
68.4
0.186
0.089
GREAT
CVPR 2025
7.31
72.0
0.209
0.085
PointRefer
CVPR 2024
8.47
75.8
0.232
0.082
GLANCE
ICCV 2025
11.82
85.2
0.268
0.075
CompassNet
Ours
15.36
87.4
0.339
0.059
All methods trained and evaluated under identical settings. Red bold = best, underline = second-best. aIoU is the primary metric.
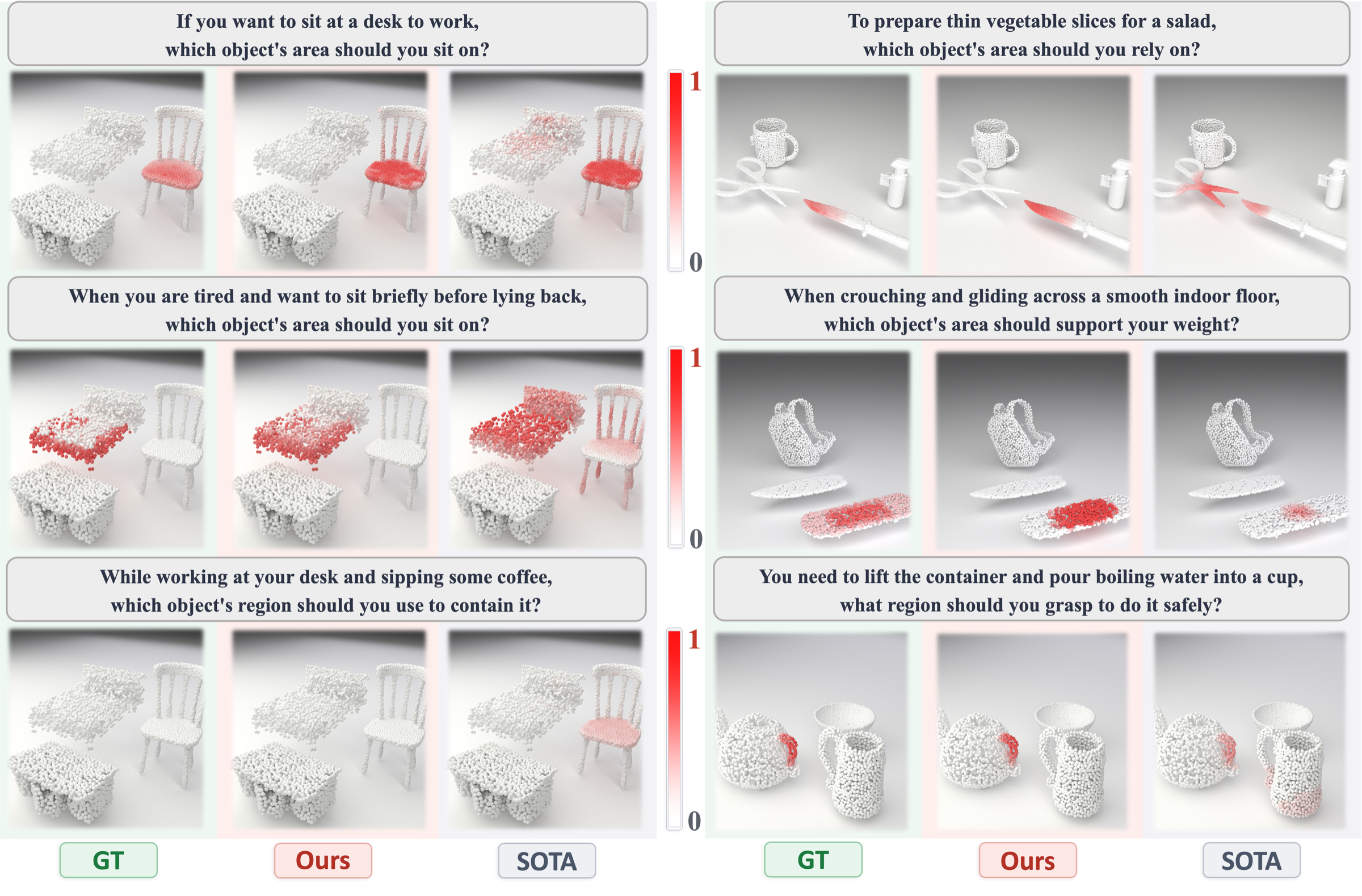
Qualitative Comparison
Same composition, different intents → different activated objects and regions.
Each triplet shows ground truth (GT), CompassNet (Ours), and GLANCE (SOTA). Left: same composition queried with different intents activates different objects/regions (chair seat vs. bed surface). Right: diverse confusing pairs (knife/scissors, skateboard/surfboard, kettle/cup). Red denotes higher affordance probability.
Ablation Study+
Removing ICI drops aIoU by 2.96; removing BCR drops by 1.50. Every sub-component contributes.
Configuration
aIoU ↑
AUC ↑
SIM ↑
MAE ↓
CompassNet (Full)
18.20
89.2
0.368
0.061
Baseline (w/o ICI & BCR)
13.80
87.2
0.290
0.079
Ablation on ICI
w/o ICI
15.24
87.8
0.311
0.073
w/o Background token
17.58
88.9
0.360
0.064
w/o Group relevance loss
17.26
88.6
0.352
0.066
w/o Gated propagation
16.93
88.5
0.343
0.068
Ablation on BCR
w/o BCR
16.70
88.4
0.353
0.066
w/o TG-Softmax
17.28
88.7
0.357
0.065
w/o TP-HardNeg
17.62
88.9
0.362
0.063
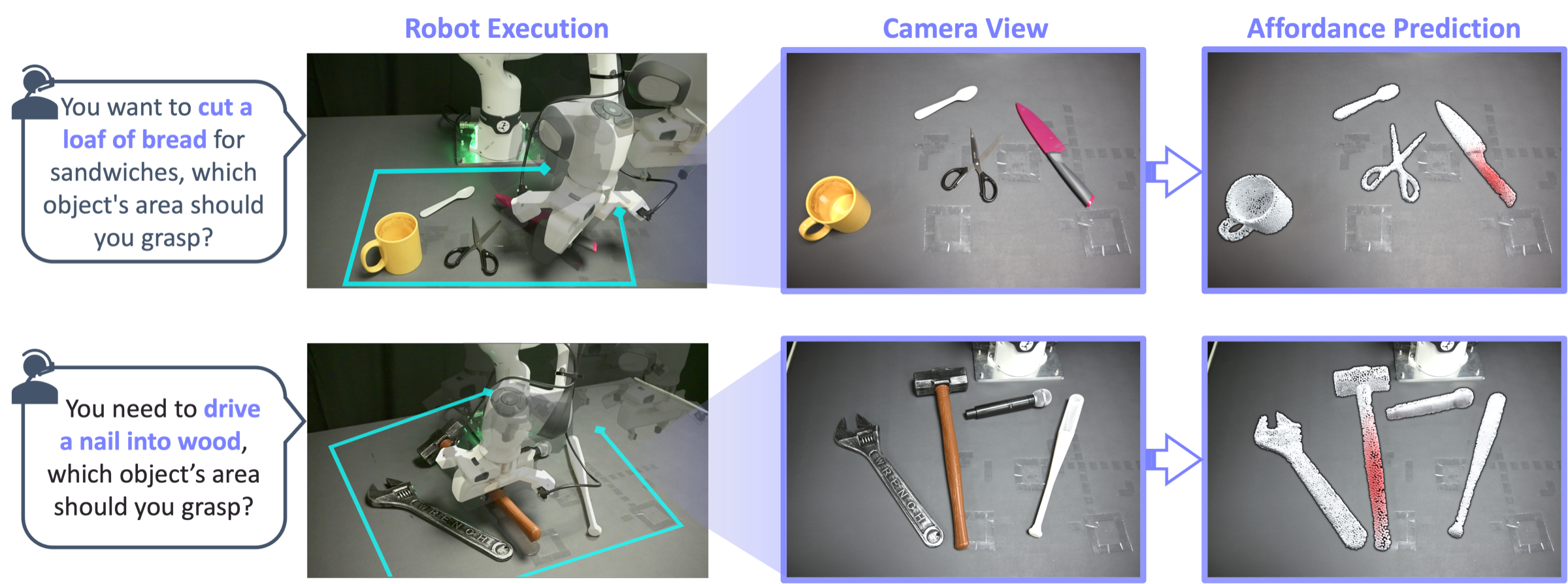
№ 06 · Robotics
From Benchmark to Robot Arm.
Each row shows the captured scene, CompassNet's affordance prediction on the reconstructed point cloud (red = high probability), and the executed grasp. Top: a cutting query selects the knife over scissors. Bottom: a hammering query selects the hammer over distractors.
№ 07 · Citation
Cite this work.
If you find CompassAD useful in your research, please consider citing.
@article{Li2026CompassAD,
title = {CompassAD: Intent-Driven 3D Affordance Grounding in Functionally Competing Objects},
author = {Li, Jingliang and Jia, Jindou and An, Tuo and Zhou, Chuhao and
Chen, Xiangyu and Shan, Shilin and Ma, Boyu and Lyu, Bofan and
Li, Gen and Yang, Jianfei},
year = {2026},
eprint = {2604.02060},
archivePrefix = {arXiv},
primaryClass = {cs.CV}
}